







Technical Details
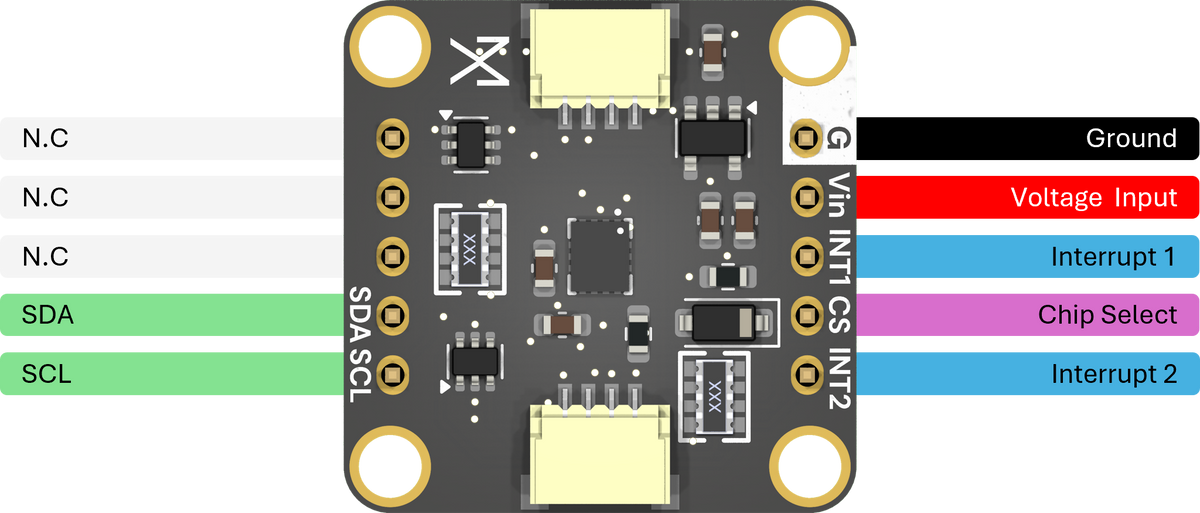
Pinout
Technical Resources
Accelerometer (LSM6DS3TR) - (AX22-0054)

PCB FRONT

PCB BACK
🖱️ Click & drag to rotate
Arduino Example Snippet
#include <Adafruit_LSM6DS3.h>
Adafruit_LSM6DS3 lsm6ds;
Adafruit_Sensor *lsm_temp, *lsm_accel, *lsm_gyro;
void setup(void) {
Serial.begin(115200);
while (!Serial)
delay(10);
Serial.println("Adafruit LSM6DS3TR test!");
if (!lsm6ds.begin_I2C(0x6B)) {
Serial.println("Failed to find LSM6DS chip");
while (1) {
delay(10);
}
}
Serial.println("LSM6DS3TR Found!");
lsm_temp = lsm6ds.getTemperatureSensor();
lsm_temp->printSensorDetails();
lsm_accel = lsm6ds.getAccelerometerSensor();
lsm_accel->printSensorDetails();
lsm_gyro = lsm6ds.getGyroSensor();
lsm_gyro->printSensorDetails();
}
void loop() {
sensors_event_t accel;
sensors_event_t gyro;
sensors_event_t temp;
lsm_temp->getEvent(&temp);
lsm_accel->getEvent(&accel);
lsm_gyro->getEvent(&gyro);
Serial.print("\t\tTemperature ");
Serial.print(temp.temperature);
Serial.println(" deg C");
/* Display the results (acceleration is measured in m/s^2) */
Serial.print("\t\tAccel X: ");
Serial.print(accel.acceleration.x);
Serial.print(" \tY: ");
Serial.print(accel.acceleration.y);
Serial.print(" \tZ: ");
Serial.print(accel.acceleration.z);
Serial.println(" m/s^2 ");
/* Display the results (rotation is measured in rad/s) */
Serial.print("\t\tGyro X: ");
Serial.print(gyro.gyro.x);
Serial.print(" \tY: ");
Serial.print(gyro.gyro.y);
Serial.print(" \tZ: ");
Serial.print(gyro.gyro.z);
Serial.println(" radians/s ");
Serial.println();
delay(100);
}